- Kabel används
- Verifieringsinstruktioner
- Oscillografi av K-CAN, PT-CAN, F-CAN
- Motståndsmätningsordning med matchande motstånd K-CAN, PT-CAN och F-CAN
- K-CAN
- PT-CAN, F-CAN
- OBS!
- CAN-buss fungerar inte
Den här handboken används för att kontrollera att CAN-signalens höga nivå och CAN-signalens låga nivå korrekt överförs till bussanslutningen.
Kabel används
Multifunktionskabel
Verifieringsinstruktioner
- Spänningstest (oscilloskop): För att kontrollera spänningen måste batteriet vara anslutet och tändningen påslagen.
- Resistansmätning: Vid mätning av motstånd är det nödvändigt att objektet som ska mätas slås av innan mätningen. För att göra detta kopplas batteriet bort. Vänta 3 minuter tills alla kondensatorer i systemet laddas ur.
KAN information
CAN-bussen (Controller Area Network) är ett seriellt bussystem med följande funktioner:
- signalutbredning sker i båda riktningarna.
- Varje meddelande tas emot av alla bussabonnenter. Varje bussabonnent bestämmer om han kommer att använda meddelandet,
- Ytterligare bussabonnenter läggs till genom enkel parallellanslutning.
- Bussystemet bildar ett system med en förare. Varje bussabonnent kan vara en förare eller ett ställdon beroende på om den är ansluten som sändare eller mottagare.
- En tvåtrådsanslutning används som överföringsmedium. Trådbeteckningar: KAN lågt och KAN högt.
- Som regel kan varje bussabonnent kommunicera via buss med alla andra bussabonnenter. Datautbytet på bussen regleras av reglerna för åtkomst. Den största skillnaden mellan K-CAN-databussen (kaross-CAN-buss), PT-CAN-buss (motor- och växellåda-CAN-buss) och F-CAN-bussen (chassi-CAN-buss) är:
- K-CAN: dataöverföringshastighet ca. 100 Kbps Enkeltråd möjlig.
- PT-CAN: dataöverföringshastighet ca. 500 Kbps Enkeltrådsläge är inte möjligt.
- F-CAN: dataöverföringshastighet ca. 500 Kbps Enkeltrådsläge är inte möjligt.
Driver: Föraren är en aktiv kommunikationspartner som kommunikationsinitiativet kommer från. Föraren har företräde och kontrollerar kommunikationen. Den kan skicka meddelanden till den passiva bussabonnenten (ställdon) via bussystemet och på begäran få sina meddelanden.
Ställdon: ställdonet är en passiv kommunikationsmedlem. Den får ett kommando för att ta emot och överföra data.
System med masterapparat: i ett system med en masterenhet kan kommunikationsdeltagare vid en viss tidpunkt anta rollen som master eller ställdon.
Oscillografi av K-CAN, PT-CAN, F-CAN
För större tydlighet, om CAN-bussen fungerar felfritt, måste du titta på busskommunikationen. Samtidigt finns det inget behov av att analysera enskilda bitar, och du behöver bara se till att CAN-bussen fungerar. Oscillografi visar: ”CAN-bussen fungerar uppenbarligen utan störningar”.
Vid mätning med ett spänningsoscilloskop får en CAN (eller hög CAN-hög) lågnivå ledning och jord en kvadratisk vågsignal inom spänningsområdet:
K-CAN:
Låg CAN-nivå relativt massan: U min = 1 V och U max = 5 V
Hög CAN-nivå relativt massan: U min = 0 V och U max = 4 V
Dessa värden är ungefärliga och kan variera, beroende på bussbelastningen, med upp till 100 mV.
Oscilloskopinställningar för mätning på K-CAN:
CH1: sond 1, rang 2 B / div; DC DC2-anslutning: sond 2, grad 2 V / div; DC-anslutningstid: 50 ms / div
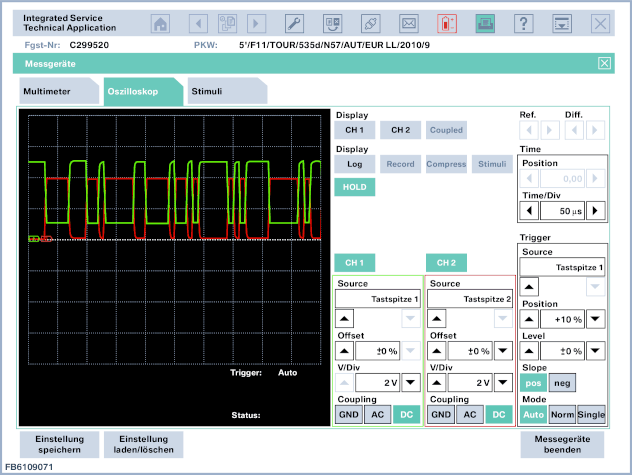
Fig. 1: K-CAN-mätning: CH1 låg CAN-nivå, CH2 hög CAN-nivå
Vid mätning med ett spänningsoscilloskop får en CAN (eller hög CAN-hög) lågnivå ledning och jord en kvadratisk vågsignal inom spänningsområdet:
PT-CAN och F-CAN
Låg CAN-nivå relativt massan: U min = 1,5 V och U max = 2,5 V
Hög CAN-nivå relativt massan: U min = 2,5 V och U max = 3,5 V
Dessa värden är ungefärliga och kan variera, beroende på bussbelastningen, med upp till 100 mV.
Oscilloskopinställningar för PT-CAN (eller F-CAN) mätning:
CH1: sond 1, rang 1 B / div; DC DC2-anslutning: sond 2, grad 1 V / div; DC-anslutningstid: 10 ms / div 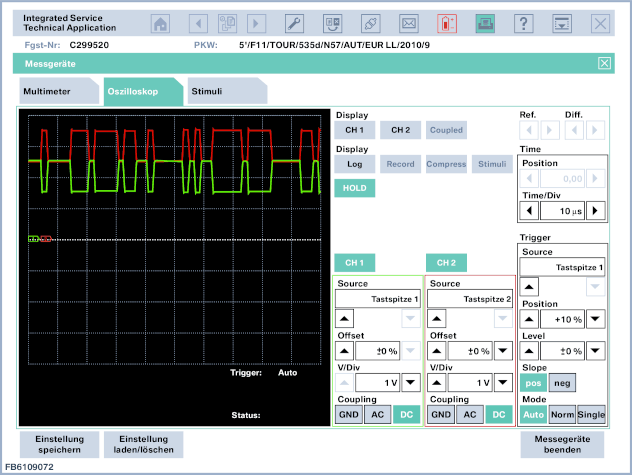
Bild 2: PT-CAN-mätning: CH1 Low CAN, CH2 High CAN
Motståndsmätningsordning med matchande motstånd K-CAN, PT-CAN och F-CAN
Processen för att kontrollera resistansmätningen:
- CAN-buss måste slås av
- Inga andra mätenheter ska anslutas (parallellanslutning av mätanordningar)
- Mätning sker mellan CAN låg nivå och CAN hög nivå ledningar.
- Faktiska värden kan skilja sig från angivna värden med flera ohm.
K-CAN
En separat motståndsmätning kan inte göras på K-CAN-bussen, eftersom motståndet varierar beroende på datorns kopplingslogik!
PT-CAN, F-CAN
För att förhindra reflektion av signalen laddas två CAN-bussabonnenter (med det maximala avståndet i PT-CAN-nätverket) med ett motstånd på 120 Ohm. Båda belastningsmotståndet är parallellt anslutna och bildar ett motsvarande motstånd på 60 ohm. När matningsspänningen är frånkopplad kan detta ekvivalenta motstånd mätas mellan dataledningarna. Dessutom kan individuella motstånd mätas individuellt.
Mätinstruktioner med ett motstånd på 60 ohm: Koppla bort en lättillgänglig dator från däcket. Mät motståndet vid anslutningen mellan de låga och höga CAN-ledningarna.
OBS!
Inte alla bilar har ett avslutningsmotstånd på CAN-bussen. Närvaron av det inbyggda avslutningsmotståndet på det anslutna fordonet kan kontrolleras med lämpligt kopplingsschema.
CAN-buss fungerar inte
Om K-CAN- eller PT-CAN-databussen inte fungerar, kan det vara en kortslutning eller en trasig hög eller låg CAN-kabel. Eller defekt ECU.
För att lokalisera orsaken till felet rekommenderas det att följa följande:
- Koppla bort CAN-abonnenterna i sin tur tills ett block hittas som är orsaken till felet (= ECU X).
- Kontrollera kablar till dator X för kortslutning eller öppen krets.
- Kontrollera om möjligt ECU X.
- En sådan åtgärdssekvens leder till framgång endast om kortslutningen har en verifierbar tråd från datorn till CAN-bussen. Om ledningen i CAN-bussen själv har en kortslutning måste du kontrollera ledningsnätet.
Vi förbehåller oss rätten till typografiska fel, semantiska fel och tekniska förändringar.


 Aston Martin
Aston Martin
 Audi
Audi
 Bentley
Bentley
 BMW
BMW
 Cadillac
Cadillac
 Chery
Chery
 Chevrolet
Chevrolet
 Citroen
Citroen
 Daewoo
Daewoo
 Hyundai
Hyundai
 Infiniti
Infiniti
 Jaguar
Jaguar
 Jeep
Jeep
 Kia
Kia
 Lada
Lada
 Land Rover
Land Rover
 Lexus
Lexus
 Lifan
Lifan


